- 1. Tips and Tricks for the Project
- 2. Advanced Lane Finding(概要)
- Step1:Camera Calibration 摄像机标定
- Step2:梯度与颜色空间处理
- step3: 透视变换(bird eye)
- step4:检测车道线
- step5:计算曲率半径和中心偏移
- step6: Set the final pipeline
- step7: Processing the video
- 总结
1. Tips and Tricks for the Project
在本章的学习中,掌握了新的方式去检测和追踪车道线信息,下面是在项目中需要使用的处理方法。
- Camera calibration 摄像头校正
之前的课程和练习中已有涉及了,本项目中使用9×6的棋盘,而不是课程中的8×6。
- 计算出来的斜率是否正确
计算出来的半径应该接近1km。
- 偏移 offset
假设摄像头假设在车的中心部分,那么图像上检测出的两条车道线的中点,就是车道线的中心。从图像中心到车道线中心的偏移,就是车到车道线中心线的距离。
如下图,紫色圆点是车道线中心,黄色圆点是自车位置:

- 追踪
在测试图像上完成pipeline的创建后,我们要将其应用在video流上。
- Sanity(头脑清楚的) Check
往下一步之前,需要对检测结果进行check,检查如下结果:
- 是否有类似的斜率
- 是否它们是否被近似的正确的水平距离所分开 (懵逼状,啥意思…)
- 是否近似的平行
- Look-Ahead(有预见性的) Filter
一旦在video的一帧图像中找到了车道线,而且相当自信找到的车道线是正确的,那么在下一帧图像中可以不需要盲找。
比如,如果匹配了一个多项式,那么对于每个y的位置,都有一个x位置可以表示其车道线中心。
-
Reset
-
平滑处理
-
描画
# Create an image to draw the lines on
warp_zero = np.zeros_like(warped).astype(np.uint8)
color_warp = np.dstack((warp_zero, warp_zero, warp_zero))
# Recast the x and y points into usable format for cv2.fillPoly()
pts_left = np.array([np.transpose(np.vstack([left_fitx, ploty]))])
pts_right = np.array([np.flipud(np.transpose(np.vstack([right_fitx, ploty])))])
pts = np.hstack((pts_left, pts_right))
# Draw the lane onto the warped blank image
cv2.fillPoly(color_warp, np.int_([pts]), (0,255, 0))
# Warp the blank back to original image space using inverse perspective matrix (Minv)
newwarp = cv2.warpPerspective(color_warp, Minv, (image.shape[1], image.shape[0]))
# Combine the result with the original image
result = cv2.addWeighted(undist, 1, newwarp, 0.3, 0)
plt.imshow(result)
2. Advanced Lane Finding(概要)
这个项目中要完成的工作如下:
- 摄像机标定,计算出标定矩阵和校正参数(使用围棋格数据),参考
- 将上面计算的参数应用到道路数据中,对数据实施纠正处理,参考
- 使用color transforms, gradients 等生成 thresholded binary image,参考
- 使用birds-eye对上面的binary image进行视角变换,参考
- 检测lane pixel,参考
- 计算lane的曲率半径以及自车的lane中心偏移,参考
- 将检测到的lane,描画到原始图像中
- 将lane曲率半径以及lane中心偏移距离,显示在原始图像中
- 处理video
步骤以及结果,参考下面的图:
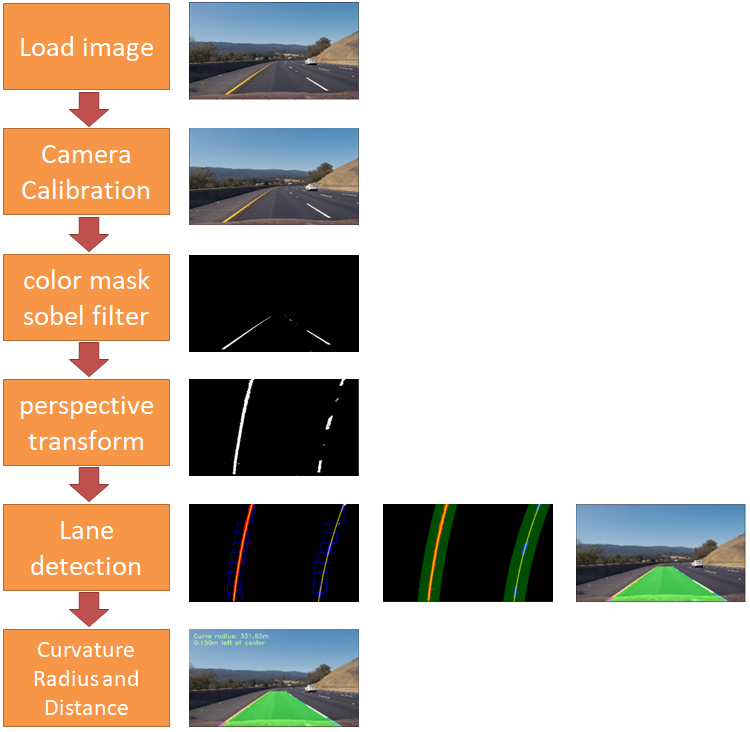
Step1:Camera Calibration 摄像机标定
由于相机的凸出,所以会产生畸变,如下图所示,走道的栏杆是笔直延伸的,但是看上去确实弯曲的,这就是图像畸变,畸变导致图像失真。

使用有畸变的图像做车道线检测,检测结果的精度将会受到影响,因此进行图像处理第一步就是去除畸变。
为了解决摄像机图像的畸变问题,摄像机标定技术产生了,摄像机标定是通过对已知的形状进行拍摄,通过计算该形状在真实世界中的位置与在图像中的位置的偏差量,即畸变参数,从而用这个偏差量去修正其他畸变图像。
通常的标定方法都是基于棋盘格,因为它具备规则的高对比度,能非常方便的自动化检测各个棋盘的交点,十分适合标定摄像机的标定。
代码如下:
import numpy as np
import cv2
import glob
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import os
%matplotlib inline
nx = 9
ny = 6
# prepare object points, like (0,0,0), (1,0,0), (2,0,0) ....,(6,5,0)
objp = np.zeros((ny*nx,3), np.float32)
objp[:,:2] = np.mgrid[0:nx,0:ny].T.reshape(-1,2)
# Arrays to store object points and image points from all the images.
objpoints = [] # 3d points in real world space
imgpoints = [] # 2d points in image plane.
# Make a list of calibration images
images = glob.glob('./camera_cal/calibration2.jpg')
def cal_undistort(img, objpoints, imgpoints):
# Use cv2.calibrateCamera() and cv2.undistort()
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
ret, mtx, dist, rvecs, tvecs = cv2.calibrateCamera(objpoints, imgpoints, gray.shape[::-1], None, None)
undist = cv2.undistort(img, mtx, dist, None, mtx)
return undist
# Step through the list and search for chessboard corners
for fname in images:
img = cv2.imread(fname)
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
# Find the chessboard corners
ret, corners = cv2.findChessboardCorners(gray, (nx,ny),None)
# If found, add object points, image points
if ret == True:
objpoints.append(objp)
imgpoints.append(corners)
img_corners = np.copy(img)
img_corners = cv2.drawChessboardCorners(img_corners, (nx,ny), corners, ret)
undist = cal_undistort(img, objpoints, imgpoints)
f, (ax1, ax2, ax3) = plt.subplots(1, 3, figsize=(16,4))
ax1.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
ax1.set_title('Original Image', fontsize=18)
ax2.imshow(cv2.cvtColor(img_corners, cv2.COLOR_BGR2RGB))
ax2.set_title('With Corners', fontsize=20)
ax3.imshow(cv2.cvtColor(undist, cv2.COLOR_BGR2RGB))
ax3.set_title('Undistorted image', fontsize=20)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step1_undistorted_" + filename + '.jpg')

- findChessboardCorners(),自动地检测棋盘格内4个棋盘格的交点(2白2黑的交接点),需要输入摄像机拍摄的完整棋盘格图像和交点在横纵向上的数量.
- 如果找到的话,就将对应点的图像位置,存储到 imgpoints中,objpoints中存储的是规则的矩阵np.zeros((ny*nx,3), np.float32)。
- drawChessboardCorners(img_corners, (nx,ny), corners, ret),描画检测到的交点。
- 使用得到的对比矩阵和函数cal_undistort(),得到纠正后的图像。
使用上面的棋盘得到对应的矩阵后,将其应用到实际的道路数据中,代码如下:
images = glob.glob('./test_images/test3.jpg')
for fname in images:
img = cv2.imread(fname)
undist = cal_undistort(img, objpoints, imgpoints)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(16,4))
ax1.imshow(cv2.cvtColor(img, cv2.COLOR_BGR2RGB))
ax1.set_title('Original Image', fontsize=18)
ax2.imshow(cv2.cvtColor(undist, cv2.COLOR_BGR2RGB))
ax2.set_title('Undistorted image', fontsize=20)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step1_undistorted_" + filename + '.jpg')

Step2:梯度与颜色空间处理
在道路图像上,真正感兴趣的是车道线,不是周边的树和车,所以我们要用梯度和颜色过滤掉不需要的信息,过滤的时候就需要考虑车道线的特征:
- 颜色: 白色或黄色
- 角度:有一定的角度
代码如下:
def get_thresholded_image(img):
# convert to gray scale
gray = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY)
height, width = gray.shape
# apply gradient threshold on the horizontal gradient
sx_binary = abs_sobel_thresh(gray, 'x', 10, 200)
# apply gradient direction threshold so that only edges closer to vertical are detected.
dir_binary = dir_threshold(gray, thresh=(np.pi/6, np.pi/2))
# combine the gradient and direction thresholds.
combined_condition = ((sx_binary == 1) & (dir_binary == 1))
# R & G thresholds so that yellow lanes are detected well.
color_threshold = 150
R = img[:,:,0]
G = img[:,:,1]
color_combined = np.zeros_like(R)
r_g_condition = (R > color_threshold) & (G > color_threshold)
# color channel thresholds
hls = cv2.cvtColor(img, cv2.COLOR_RGB2HLS)
S = hls[:,:,2]
L = hls[:,:,1]
# S channel performs well for detecting bright yellow and white lanes
s_thresh = (100, 255)
s_condition = (S > s_thresh[0]) & (S <= s_thresh[1])
# We put a threshold on the L channel to avoid pixels which have shadows and as a result darker.
l_thresh = (120, 255)
l_condition = (L > l_thresh[0]) & (L <= l_thresh[1])
# combine all the thresholds
# A pixel should either be a yellowish or whiteish
# And it should also have a gradient, as per our thresholds
color_combined[(r_g_condition & l_condition) & (s_condition | combined_condition)] = 1
# apply the region of interest mask
mask = np.zeros_like(color_combined)
region_of_interest_vertices = np.array([[0,height-1], [width/2, int(0.5*height)], [width-1, height-1]], dtype=np.int32)
cv2.fillPoly(mask, [region_of_interest_vertices], 1)
thresholded = cv2.bitwise_and(color_combined, mask)
return thresholded
def abs_sobel_thresh(gray, orient='x', thresh_min=0, thresh_max=255):
if orient == 'x':
sobel = cv2.Sobel(gray, cv2.CV_64F, 1, 0)
else:
sobel = cv2.Sobel(gray, cv2.CV_64F, 0, 1)
abs_sobel = np.absolute(sobel)
max_value = np.max(abs_sobel)
binary_output = np.uint8(255*abs_sobel/max_value)
threshold_mask = np.zeros_like(binary_output)
threshold_mask[(binary_output >= thresh_min) & (binary_output <= thresh_max)] = 1
return threshold_mask
def dir_threshold(gray, sobel_kernel=3, thresh=(0, np.pi/2)):
# Take the gradient in x and y separately
sobel_x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=sobel_kernel)
sobel_y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=sobel_kernel)
# 3) Take the absolute value of the x and y gradients
abs_sobel_x = np.absolute(sobel_x)
abs_sobel_y = np.absolute(sobel_y)
# 4) Use np.arctan2(abs_sobely, abs_sobelx) to calculate the direction of the gradient
direction = np.arctan2(abs_sobel_y,abs_sobel_x)
direction = np.absolute(direction)
# 5) Create a binary mask where direction thresholds are met
mask = np.zeros_like(direction)
mask[(direction >= thresh[0]) & (direction <= thresh[1])] = 1
# 6) Return this mask as your binary_output image
return mask
#cv2.imwrite('thresholded.jpg',thresholded)
# Plot the 2 images side by side
images = glob.glob('./test_images/test3.jpg')
for fname in images:
image = mpimg.imread(fname)
undist = cal_undistort(image, objpoints, imgpoints)
thresholded = get_thresholded_image(undist)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(24, 9))
f.tight_layout()
ax1.imshow(image)
ax1.set_title('Original Image', fontsize=50)
ax2.imshow(thresholded, cmap='gray')
ax2.set_title('Thresholded Image', fontsize=50)
plt.subplots_adjust(left=0., right=1, top=0.9, bottom=0.)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step2_thresholded_" + filename + '.jpg')

1. 根据角度处理
def dir_threshold(gray, sobel_kernel=3, thresh=(0, np.pi/2)):
# Take the gradient in x and y separately
sobel_x = cv2.Sobel(gray, cv2.CV_64F, 1, 0, ksize=sobel_kernel)
sobel_y = cv2.Sobel(gray, cv2.CV_64F, 0, 1, ksize=sobel_kernel)
# 3) Take the absolute value of the x and y gradients
abs_sobel_x = np.absolute(sobel_x)
abs_sobel_y = np.absolute(sobel_y)
# 4) Use np.arctan2(abs_sobely, abs_sobelx) to calculate the direction of the gradient
direction = np.arctan2(abs_sobel_y,abs_sobel_x)
direction = np.absolute(direction)
# 5) Create a binary mask where direction thresholds are met
mask = np.zeros_like(direction)
mask[(direction >= thresh[0]) & (direction <= thresh[1])] = 1
# 6) Return this mask as your binary_output image
return mask
... ...
dir_binary = dir_threshold(gray, thresh=(np.pi/6, np.pi/2))
2. sobel算子处理
def abs_sobel_thresh(gray, orient='x', thresh_min=0, thresh_max=255):
if orient == 'x':
sobel = cv2.Sobel(gray, cv2.CV_64F, 1, 0)
else:
sobel = cv2.Sobel(gray, cv2.CV_64F, 0, 1)
abs_sobel = np.absolute(sobel)
max_value = np.max(abs_sobel)
binary_output = np.uint8(255*abs_sobel/max_value)
threshold_mask = np.zeros_like(binary_output)
threshold_mask[(binary_output >= thresh_min) & (binary_output <= thresh_max)] = 1
return threshold_mask
... ...
sx_binary = abs_sobel_thresh(gray, 'x', 10, 200)
3. 颜色处理
# R & G thresholds so that yellow lanes are detected well.
color_threshold = 150
R = img[:,:,0]
G = img[:,:,1]
color_combined = np.zeros_like(R)
r_g_condition = (R > color_threshold) & (G > color_threshold)
# color channel thresholds
hls = cv2.cvtColor(img, cv2.COLOR_RGB2HLS)
S = hls[:,:,2]
L = hls[:,:,1]
# S channel performs well for detecting bright yellow and white lanes
s_thresh = (100, 255)
s_condition = (S > s_thresh[0]) & (S <= s_thresh[1])
# We put a threshold on the L channel to avoid pixels which have shadows and as a result darker.
l_thresh = (120, 255)
l_condition = (L > l_thresh[0]) & (L <= l_thresh[1])
step3: 透视变换(bird eye)
“透视”是图像成像时,物体距离摄像机越远,看起来越小的一种现象。在真实世界中,左右互相平行的车道线,会在图像的最远处交汇成一个点。这个现象就是“透视成像”的原理造成的。
通过使用透视变换技术,可以将不规则的八边形投影成规则的正八边形。应用透视变换后的结果对比如下:

透视变换的原理: 首先新建一副跟左图一样的右图,随后在图中选择标志牌位于两侧的四个点,记录这四个点的坐标,原图为srcpoint。在新图中选择一个长方形区域,这四个端点一一对应原图的srcpoint,这四个新的点为dstpoint,得到这新旧的点后,用 cv2.getPerspectiveTransform(src_points, dst_points),就能得到投影矩阵和投影变换后的图像了。
def birds_eye(img):
img_size = (img.shape[1],img.shape[0])
src = np.float32(
[[585,460],
[203,720],
[695,460],
[1127,720]]
)
dst = np.float32(
[[320,0],
[320,720],
[960,0],
[960,720]]
)
M = cv2.getPerspectiveTransform(src,dst)
Minv = cv2.getPerspectiveTransform(dst, src)
warped = cv2.warpPerspective(img,M,img_size,flags=cv2.INTER_LINEAR)
return warped,M,Minv
images = glob.glob('./test_images/test3.jpg')
for fname in images:
image = mpimg.imread(fname)
combined_binary = get_thresholded_image(image)
warped,M,Minv = birds_eye(combined_binary)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(16,4))
ax1.imshow(combined_binary, cmap='gray')
ax1.set_title('bianary', fontsize=18)
ax2.imshow(warped, cmap='gray')
ax2.set_title('birds eye image', fontsize=20)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step3_birds-eye_" + filename + '.jpg')

step4:检测车道线
1. 直方图
要处理的图像的分辨率是1280*70,如果将每一列白色的点数量进行统计,即可以得到1280个值,将这1280个值绘制在一个坐标系中,横坐标为1-1280,纵坐标为白色点的数量,这个图就是直方图,代码及效果如下:
def hist(img):
# Lane lines are likely to be mostly vertical nearest to the car
bottom_half = img[img.shape[0]//2:,:]
# Sum across image pixels vertically - make sure to set an `axis`
# i.e. the highest areas of vertical lines should be larger values
histogram = np.sum(bottom_half, axis=0)
return histogram
# Visualize the resulting histogram
images = glob.glob('./test_images/test3.jpg')
for fname in images:
image = mpimg.imread(fname)
combined_binary = get_thresholded_image(image)
warped,M,Minv = birds_eye(combined_binary)
histogram = hist(warped)
plt.plot(histogram)
plt.show()

找到直方图左半边最大值所对应的列数,即为左车道线所在的大致位置;找到直方图右半边最大值所对应的列数,即为右车道线所在的大致位置。
2. 滑动窗口法
leftx_base和rightx_base即为左右车道线所在列的大致位置。 确定了左右车道线的大致位置后,使用一种叫做“滑动窗口”的技术,在图中对左右车道线的点进行搜索。
def fit_lines(warped,show=False):
histogram = hist(warped)
# Peak in the first half indicates the likely position of the left lane
half_width = np.int(histogram.shape[0]//2)
leftx_base = np.argmax(histogram[:half_width])
# Peak in the second half indicates the likely position of the right lane
rightx_base = np.argmax(histogram[half_width:]) + half_width
out_img = np.dstack((warped, warped, warped))*255
non_zeros = warped.nonzero()
non_zeros_y = non_zeros[0]
non_zeros_x = non_zeros[1]
num_windows = 10
num_rows = warped.shape[0]
window_height = np.int(num_rows/num_windows)
window_half_width = 50
min_pixels = 100
left_coordinates = []
right_coordinates = []
for window in range(num_windows):
y_max = num_rows - window*window_height
y_min = num_rows - (window+1)* window_height
left_x_min = leftx_base - window_half_width
left_x_max = leftx_base + window_half_width
cv2.rectangle(out_img, (left_x_min, y_min), (left_x_max, y_max), [0,0,255],2)
good_left_window_coordinates = ((non_zeros_x >= left_x_min) & (non_zeros_x <= left_x_max) & (non_zeros_y >= y_min) & (non_zeros_y <= y_max)).nonzero()[0]
left_coordinates.append(good_left_window_coordinates)
if len(good_left_window_coordinates) > min_pixels:
leftx_base = np.int(np.mean(non_zeros_x[good_left_window_coordinates]))
right_x_min = rightx_base - window_half_width
right_x_max = rightx_base + window_half_width
cv2.rectangle(out_img, (right_x_min, y_min), (right_x_max, y_max), [0,0,255],2)
good_right_window_coordinates = ((non_zeros_x >= right_x_min) & (non_zeros_x <= right_x_max) & (non_zeros_y >= y_min) & (non_zeros_y <= y_max)).nonzero()[0]
right_coordinates.append(good_right_window_coordinates)
if len(good_right_window_coordinates) > min_pixels:
rightx_base = np.int(np.mean(non_zeros_x[good_right_window_coordinates]))
left_coordinates = np.concatenate(left_coordinates)
right_coordinates = np.concatenate(right_coordinates)
out_img[non_zeros_y[left_coordinates], non_zeros_x[left_coordinates]] = [255,0,0]
out_img[non_zeros_y[right_coordinates], non_zeros_x[right_coordinates]] = [0,0,255]
left_x = non_zeros_x[left_coordinates]
left_y = non_zeros_y[left_coordinates]
polyfit_left = np.polyfit(left_y, left_x, 2)
right_x = non_zeros_x[right_coordinates]
right_y = non_zeros_y[right_coordinates]
polyfit_right = np.polyfit(right_y, right_x, 2)
y_points = np.linspace(0, num_rows-1, num_rows)
left_x_predictions = polyfit_left[0]*y_points**2 + polyfit_left[1]*y_points + polyfit_left[2]
right_x_predictions = polyfit_right[0]*y_points**2 + polyfit_right[1]*y_points + polyfit_right[2]
if show == True:
plt.imshow(out_img)
plt.plot(left_x_predictions, y_points, color='yellow')
plt.plot(right_x_predictions, y_points, color='yellow')
plt.xlim(0, warped.shape[1])
plt.ylim(warped.shape[0],0)
return polyfit_left,polyfit_right

- 首先根据前面介绍的直方图方法,找到左右车道车线的大致位置,将这两个大致位置作为起始点,定义一个矩形区域,称为窗口。分别以这两个起始点作为窗口的下边线中点,存储所有在方块中的白色点的横坐标。

- 随后对存储的横坐标取均值,将该均值所在的列以及第一个窗口的上边缘所在的位置,作为下一个窗口的下边线中点,继续搜索。

- 依次往复,至到把所有的行都搜索完毕。

- 所有落在窗口(图中棕色区域)中的白点,即为左右车道线的待选点,如下图蓝色和红色所示。随后将蓝色点和红色点做三次曲线拟合,即可得到车道线的曲线方程。

3. 跟踪车道线
视频数据是连续的图片,基于连续两帧图像中的车道线不会突变,我们可以使用上一帧检测得到的车线结果,作为下一帧图像处理的输入,搜索上一帧车道线的检测结果附近的点,这样不仅可以减少计算量,而且得到的车道线结果也更稳定。

上图中细黄线为上一帧检测到的车道线结果,绿色阴影为细黄线横向扩展的一个区域,通过搜索该区域内的白点坐标,即可快速确定当前帧中左右车道线的待选点。
代码如下:
def fit_poly(img_shape, leftx, lefty, rightx, righty):
### TO-DO: Fit a second order polynomial to each with np.polyfit() ###
left_fit = np.polyfit(lefty, leftx, 2)
right_fit = np.polyfit(righty, rightx, 2)
# Generate x and y values for plotting
ploty = np.linspace(0, img_shape[0]-1, img_shape[0])
### TO-DO: Calc both polynomials using ploty, left_fit and right_fit ###
left_fitx = left_fit[0]*ploty**2 + left_fit[1]*ploty + left_fit[2]
right_fitx = right_fit[0]*ploty**2 + right_fit[1]*ploty + right_fit[2]
return left_fitx, right_fitx, ploty
def search_around_poly(binary_warped,left_fit,right_fit,show=False):
# HYPERPARAMETER
# Choose the width of the margin around the previous polynomial to search
# The quiz grader expects 100 here, but feel free to tune on your own!
margin = 80
# Grab activated pixels
nonzero = binary_warped.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
### TO-DO: Set the area of search based on activated x-values ###
### within the +/- margin of our polynomial function ###
### Hint: consider the window areas for the similarly named variables ###
### in the previous quiz, but change the windows to our new search area ###
left_lane_inds = ((nonzerox > (left_fit[0]*(nonzeroy**2) + left_fit[1]*nonzeroy +
left_fit[2] - margin)) & (nonzerox < (left_fit[0]*(nonzeroy**2) +
left_fit[1]*nonzeroy + left_fit[2] + margin)))
right_lane_inds = ((nonzerox > (right_fit[0]*(nonzeroy**2) + right_fit[1]*nonzeroy +
right_fit[2] - margin)) & (nonzerox < (right_fit[0]*(nonzeroy**2) +
right_fit[1]*nonzeroy + right_fit[2] + margin)))
# Again, extract left and right line pixel positions
leftx = nonzerox[left_lane_inds]
lefty = nonzeroy[left_lane_inds]
rightx = nonzerox[right_lane_inds]
righty = nonzeroy[right_lane_inds]
# Fit new polynomials
left_fitx, right_fitx, ploty = fit_poly(binary_warped.shape, leftx, lefty, rightx, righty)
## Visualization ##
# Create an image to draw on and an image to show the selection window
out_img = np.dstack((binary_warped, binary_warped, binary_warped))*255
window_img = np.zeros_like(out_img)
# Color in left and right line pixels
out_img[nonzeroy[left_lane_inds], nonzerox[left_lane_inds]] = [255, 0, 0]
out_img[nonzeroy[right_lane_inds], nonzerox[right_lane_inds]] = [0, 0, 255]
# Generate a polygon to illustrate the search window area
# And recast the x and y points into usable format for cv2.fillPoly()
left_line_window1 = np.array([np.transpose(np.vstack([left_fitx-margin, ploty]))])
left_line_window2 = np.array([np.flipud(np.transpose(np.vstack([left_fitx+margin,
ploty])))])
left_line_pts = np.hstack((left_line_window1, left_line_window2))
right_line_window1 = np.array([np.transpose(np.vstack([right_fitx-margin, ploty]))])
right_line_window2 = np.array([np.flipud(np.transpose(np.vstack([right_fitx+margin,
ploty])))])
right_line_pts = np.hstack((right_line_window1, right_line_window2))
# Draw the lane onto the warped blank image
cv2.fillPoly(window_img, np.int_([left_line_pts]), (0,255, 0))
cv2.fillPoly(window_img, np.int_([right_line_pts]), (0,255, 0))
result = cv2.addWeighted(out_img, 1, window_img, 0.3, 0)
if show == True:
# Plot the polynomial lines onto the image
plt.plot(left_fitx, ploty, color='yellow')
plt.plot(right_fitx, ploty, color='yellow')
## End visualization steps ##
return result,left_fitx, right_fitx, ploty,left_lane_inds,right_lane_inds
fname = './test_images/test3.jpg'
image = mpimg.imread(fname)
combined_binary = get_thresholded_image(image)
warped,M,Minv = birds_eye(combined_binary)
left_fit,right_fit = fit_lines(warped)
result,left_fitx, right_fitx, ploty,left_lane_inds,right_lane_inds = search_around_poly(warped,left_fit,right_fit,True)
plt.imshow(result)
4. 逆投影到原图
我们在计算透视变换矩阵时计算了两个矩阵M和Minv,使用M能够实现透视变换,使用Minv能够实现逆向透视变换。
M = cv2.getPerspectiveTransform(src,dst)
Minv = cv2.getPerspectiveTransform(dst, src)
我们将两条车道线所围成的区域涂成绿色,并将结果绘制到鸟瞰图上,使用逆透视变换矩阵反投到原图上,即可以实现原图的可视化效果,代码如下:
def draw_lane(original_img, binary_img, l_fit, r_fit, Minv):
new_img = np.copy(original_img)
if l_fit is None or r_fit is None:
return original_img
# Create an image to draw the lines on
warp_zero = np.zeros_like(binary_img).astype(np.uint8)
color_warp = np.dstack((warp_zero, warp_zero, warp_zero))
h,w = binary_img.shape
ploty = np.linspace(0, h-1, num=h)# to cover same y-range as image
left_fitx = l_fit[0]*ploty**2 + l_fit[1]*ploty + l_fit[2]
right_fitx = r_fit[0]*ploty**2 + r_fit[1]*ploty + r_fit[2]
# Recast the x and y points into usable format for cv2.fillPoly()
pts_left = np.array([np.transpose(np.vstack([left_fitx, ploty]))])
pts_right = np.array([np.flipud(np.transpose(np.vstack([right_fitx, ploty])))])
pts = np.hstack((pts_left, pts_right))
# Draw the lane onto the warped blank image
cv2.fillPoly(color_warp, np.int_([pts]), (0,255, 0))
cv2.polylines(color_warp, np.int32([pts_left]), isClosed=False, color=(255,0,255), thickness=15)
cv2.polylines(color_warp, np.int32([pts_right]), isClosed=False, color=(0,255,255), thickness=15)
# Warp the blank back to original image space using inverse perspective matrix (Minv)
newwarp = cv2.warpPerspective(color_warp, Minv, (w, h))
# Combine the result with the original image
result = cv2.addWeighted(new_img, 1, newwarp, 0.5, 0)
return result
exampleImg_out1 = draw_lane(image, warped, left_fit, right_fit, Minv)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(16,4))
ax1.imshow(image, cmap='gray')
ax1.set_title('image', fontsize=18)
ax2.imshow(exampleImg_out1, cmap='gray')
ax2.set_title('lane detected image', fontsize=20)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step4_" + filename + '.jpg')

step5:计算曲率半径和中心偏移
关于曲率半径相关公式和推导,可以参考这里
# Method to determine radius of curvature and distance from lane center
# based on binary image, polynomial fit, and L and R lane pixel indices
def calc_curv_rad_and_center_dist(bin_img, l_fit, r_fit, l_lane_inds, r_lane_inds):
# Define conversions in x and y from pixels space to meters
ym_per_pix = 3.048/100 # meters per pixel in y dimension, lane line is 10 ft = 3.048 meters
xm_per_pix = 3.7/378 # meters per pixel in x dimension, lane width is 12 ft = 3.7 meters
left_curverad, right_curverad, center_dist = (0, 0, 0)
# Define y-value where we want radius of curvature
# I'll choose the maximum y-value, corresponding to the bottom of the image
h = bin_img.shape[0]
ploty = np.linspace(0, h-1, h)
y_eval = np.max(ploty)
# Identify the x and y positions of all nonzero pixels in the image
nonzero = bin_img.nonzero()
nonzeroy = np.array(nonzero[0])
nonzerox = np.array(nonzero[1])
# Again, extract left and right line pixel positions
leftx = nonzerox[l_lane_inds]
lefty = nonzeroy[l_lane_inds]
rightx = nonzerox[r_lane_inds]
righty = nonzeroy[r_lane_inds]
if len(leftx) != 0 and len(rightx) != 0:
# Fit new polynomials to x,y in world space
left_fit_cr = np.polyfit(lefty*ym_per_pix, leftx*xm_per_pix, 2)
right_fit_cr = np.polyfit(righty*ym_per_pix, rightx*xm_per_pix, 2)
# Calculate the new radii of curvature
left_curverad = ((1 + (2*left_fit_cr[0]*y_eval*ym_per_pix + left_fit_cr[1])**2)**1.5) / np.absolute(2*left_fit_cr[0])
right_curverad = ((1 + (2*right_fit_cr[0]*y_eval*ym_per_pix + right_fit_cr[1])**2)**1.5) / np.absolute(2*right_fit_cr[0])
# Now our radius of curvature is in meters
# Distance from center is image x midpoint - mean of l_fit and r_fit intercepts
if r_fit is not None and l_fit is not None:
car_position = bin_img.shape[1]/2
l_fit_x_int = l_fit[0]*h**2 + l_fit[1]*h + l_fit[2]
r_fit_x_int = r_fit[0]*h**2 + r_fit[1]*h + r_fit[2]
lane_center_position = (r_fit_x_int + l_fit_x_int) /2
center_dist = (car_position - lane_center_position) * xm_per_pix
return left_curverad, right_curverad, center_dist
combined_binary = get_thresholded_image(image)
warped,M,Minv = birds_eye(combined_binary)
left_fit,right_fit = fit_lines(warped)
rad_l, rad_r, d_center = calc_curv_rad_and_center_dist(warped, left_fit, right_fit, left_lane_inds, right_lane_inds)
print('Radius of curvature for example:', rad_l, 'm,', rad_r, 'm')
print('Distance from lane center for example:', d_center, 'm')
将结果绘制到原图上去:
def draw_data(original_img, curv_rad, center_dist):
new_img = np.copy(original_img)
h = new_img.shape[0]
font = cv2.FONT_HERSHEY_DUPLEX
text = 'Curve radius: ' + '{:04.2f}'.format(curv_rad) + 'm'
cv2.putText(new_img, text, (40,70), font, 1.5, (200,255,155), 2, cv2.LINE_AA)
direction = ''
if center_dist > 0:
direction = 'right'
elif center_dist < 0:
direction = 'left'
abs_center_dist = abs(center_dist)
text = '{:04.3f}'.format(abs_center_dist) + 'm ' + direction + ' of center'
cv2.putText(new_img, text, (40,120), font, 1.5, (200,255,155), 2, cv2.LINE_AA)
return new_img
exampleImg_out2 = draw_data(exampleImg_out1, (rad_l+rad_r)/2, d_center)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(16,4))
ax1.imshow(image, cmap='gray')
ax1.set_title('image', fontsize=18)
ax2.imshow(exampleImg_out2, cmap='gray')
ax2.set_title('lane detected image with radius', fontsize=20)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step5_" + filename + '.jpg')
结果如下:

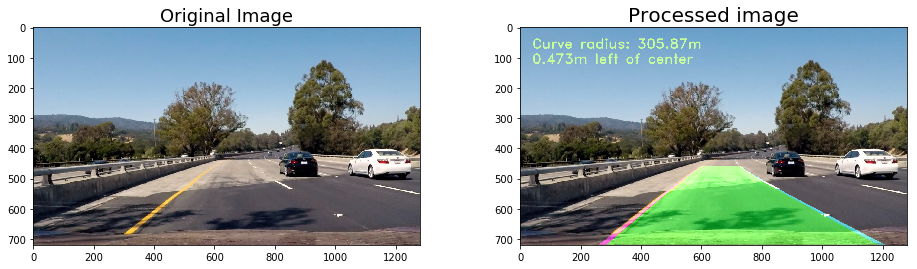
step6: Set the final pipeline
将上面所有的处理连贯起来:
def pipeline_final(image):
combined_binary = get_thresholded_image(image)
warped,M,Minv = birds_eye(combined_binary)
left_fit,right_fit = fit_lines(warped)
result,left_fitx, right_fitx, ploty,left_lane_inds,right_lane_inds = search_around_poly(warped,left_fit,right_fit)
rad_l, rad_r, d_center = calc_curv_rad_and_center_dist(warped, left_fit, right_fit, left_lane_inds, right_lane_inds)
exampleImg_out1 = draw_lane(image, warped, left_fit, right_fit, Minv)
exampleImg_out2 = draw_data(exampleImg_out1, (rad_l+rad_r)/2, d_center)
return exampleImg_out2
images = glob.glob('./test_images/test*.jpg')
for fname in images:
img = mpimg.imread(fname)
result = pipeline_final(img)
f, (ax1, ax2) = plt.subplots(1, 2, figsize=(16,4))
ax1.imshow(img)
ax1.set_title('Original Image', fontsize=18)
ax2.imshow(result)
ax2.set_title('Processed image', fontsize=20)
filename = os.path.basename(fname)
filename = os.path.splitext(filename)[0]
plt.savefig('./output_images/' + "step6_Finnal_" + filename + '.jpg')
处理后结果如下:





step7: Processing the video
处理视频数据,The finnal video can be found here
from moviepy.editor import VideoFileClip
output = 'project_video_output.mp4'
clip1 = VideoFileClip("project_video.mp4")
white_clip = clip1.fl_image(pipeline_final) #NOTE: this function expects color images!!
%time white_clip.write_videofile(output, audio=False)
总结
以上就是第二个Project的全部内容,主要就是摄像机的标定,投影变换,颜色通道,滑动窗口等技术,在计算机视觉领域得到了广泛应用。
本次处理的数据集较为简单,上面的pipeline在处理challenge video时会有问题,可能是光线过暗或是曲率过大的缘故,所以处理复杂道路场景下的视频数据是一项非常艰巨的任务,以这个车道线的提取为例,使用设定规则的方式提取车道线,虽然能够处理项目视频中的场景,但面对变化恶劣的场景仍然无能为力。
现阶段解决该问题的方法就是通过深度学习,拿足够多的标注数据去训练模型,才能尽可能的达到稳定的检测效果。