- 0. 小结
- 2. Intro
- 3. Lesson Map and Fusion Flow
- 4. Lesson Variables and Equations
- 5. Estimation Problem Refresh
- 6. Kalman Filter Intuition
- 7. Kalman Filter Equations in C++ Part 1
- 9. State Prediction
- 10. Process Covariance Matrix(协方差)
- 11. Laser Measurements Part 1
- 13. Laser Measurements Part 3
- 14. Laser Measurements Part 4
- 15. Radar Measurements
- 16. Mapping with a Nonlinear Function
- 17. Extended Kalman Filter
- 18. Multivariate Taylor Series Expansion
- 19. Jacobian Matrix Part 1
- 21. EKF Algorithm Generalization
- 22. Sensor Fusion General Flow
- 23. Evaluating KF Performance Part 1
- 25. Outro
- 26. Bonus Round: Sensor Fusion [Optional]
0. 小结
本章主要讲扩展的卡尔曼滤波器,这种扩展卡尔曼滤波器能够处理不同类型的数据,如雷达和激光雷达,由于雷达数据不同于激光雷达,当接收数据是雷达时,需要使用不同的预测和更新方式,最后描述了如何评价估算结果的方式,所有的方法都有对应C++代码。
- 参考:
- EKF Tutorial 浅显易懂的扩展滤波器介绍,而且带有交互式的程序可以确认效果
2. Intro
本模块的实战项目计划,是利用传感器融合追踪一名行人。将激光雷达和雷达的优势劣势结合起来,一起来估算行人位置,方向和速度。这些功能都是在C++中实现。
3. Lesson Map and Fusion Flow
本章中将所有学习到的知识结合起来,开发一个完整的融合模型,基于卡尔曼滤波器的融合包括很多方面。 首先需要创建一个扩展卡尔曼滤波器,扩展的意思是它能处理更复杂的运动模型和测量模型。下面是整体的处理流程:
- 首先是两个传感器,激光雷达和雷达,它们提供信息用于估算移动中行人的状态。状态通过二维位置和二维速度表示。
- 每次收到特定传感器的新测量值时,都会触发估算函数,估算函数中,我们执行两个步骤,状态预测和测量更新。
- 在预测步骤中,我们在协方差中预测行人状态。具体做法是,考虑当前和前一次观察之间的时间差。
- 在测量更新中,将取决于传感器类型,如果当前数据来自激光传感器,我们可以应用一个标准的通用滤波器来更新行人状态。雷达测量值需要使用非线性测量函数。因为我们收到雷达测量值时,会使用不同的方法来处理测量更新,比如,我们可能使用扩展滤波器方程。

卡尔曼滤波算法包含如下的步骤:
- 首次测量:滤波器将接收自行车相对于汽车位置的初始测量值,这个测量值来自于激光雷达或是雷达。
- 初始状态和其协方差矩阵:滤波器基于首次测量值,初始化自行车的位置。
- 然后在一定时间间隔Δt后,汽车收到另一个传感器测量值。
- 预测:算法将预测在时间Δt后,自行车的位置。一个基础的方式是假设自行车是匀速的。
- 更新:滤波器比较预测的位置,以及传感器的测量值,得到一个更新后的位置。这时用到的就是卡尔曼滤波器算法。
4. Lesson Variables and Equations
the derivations of the Kalman Filter equations
5. Estimation Problem Refresh
我们要追踪在无人驾驶车前移动的行人,通用滤波器时一个两步估算问题,预测与更新。
- 开始时,我们依赖已知的行人信息,推断出行人在下次测量到达时的行人状态,这叫做预测步骤。
- 下一步是更,使用新的观察数据纠正我们对于行人状态的推测值。

如果有多个测量值呢,即多个传感器同时进行测量:

实际上也是相同的流程,如上图。

- MEAN(X):是一个状态矩阵,包含了需要跟踪物体的位置和速度(velocity)
- P:是状态的协方差矩阵,包含了物体的位置和速度的不确定性信息
- k:表示时间跨度
-
k+1 k : 表示预测步骤的值 - Xk,Pk : 表示经过更新后的值
6. Kalman Filter Intuition
本节是对卡尔曼滤波的详解,可以参考卡尔曼滤波器最佳线性滤波器原理
下面是预测更新流程:

卡尔曼滤波的预测与更新公式:

预测:
上面左侧的预测公式:
- F表示状态迁移矩阵,v表示加速度减速度等不确定性因为在这段时间内产生的不确定性。x表示前一个时间段的位置和速度状态,x’表示预测的下一个时间段状态。
- P表示状态的协方差矩阵,即这个预测所产生的不确定性,FPF(T)表示迁移过来的协方差,后面的Q表示预测模型本身带来的噪声。
更新:
y=z−Hx',y表示观测本身带来的噪声,z表示观测值- K矩阵,通常也叫做卡尔曼滤波增量,它结合了预测带来的噪声P’和测量传感器的噪声R,这个矩阵可以根据噪声P和R的大小,调整到底相信预测多一点,还是相信测量值多一点。
7. Kalman Filter Equations in C++ Part 1
后面的练习中,使用到一个库 Eigen Library,参考资料here
常见使用方法的示例代码如下:
#include "Eigen/Dense"
VectorXd my_vector(2);
my_vector << 10, 20;
cout << my_vector << endl;
MatrixXd my_matrix(2,2);
my_matrix << 1, 2,
3, 4;
my_matrix(1,0) = 11; //second row, first column
my_matrix(1,1) = 12; //second row, second column
MatrixXd my_matrix_t = my_matrix.transpose();
MatrixXd my_matrix_i = my_matrix.inverse();
MatrixXd another_matrix;
another_matrix = my_matrix*my_vector;
/**
* Write a function 'filter()' that implements a multi-
* dimensional Kalman Filter for the example given
*/
#include <iostream>
#include <vector>
#include "Dense"
using std::cout;
using std::endl;
using std::vector;
using Eigen::VectorXd;
using Eigen::MatrixXd;
// Kalman Filter variables
VectorXd x; // object state
MatrixXd P; // object covariance matrix
VectorXd u; // external motion
MatrixXd F; // state transition matrix
MatrixXd H; // measurement matrix
MatrixXd R; // measurement covariance matrix
MatrixXd I; // Identity matrix
MatrixXd Q; // process covariance matrix
vector<VectorXd> measurements;
void filter(VectorXd &x, MatrixXd &P);
int main() {
/**
* Code used as example to work with Eigen matrices
*/
// design the KF with 1D motion
x = VectorXd(2);
x << 0, 0;
P = MatrixXd(2, 2);
P << 1000, 0, 0, 1000;
u = VectorXd(2);
u << 0, 0;
F = MatrixXd(2, 2);
F << 1, 1, 0, 1;
H = MatrixXd(1, 2);
H << 1, 0;
R = MatrixXd(1, 1);
R << 1;
I = MatrixXd::Identity(2, 2);
Q = MatrixXd(2, 2);
Q << 0, 0, 0, 0;
// create a list of measurements
VectorXd single_meas(1);
single_meas << 1;
measurements.push_back(single_meas);
single_meas << 2;
measurements.push_back(single_meas);
single_meas << 3;
measurements.push_back(single_meas);
// call Kalman filter algorithm
filter(x, P);
return 0;
}
void filter(VectorXd &x, MatrixXd &P) {
for (unsigned int n = 0; n < measurements.size(); ++n) {
VectorXd z = measurements[n];
// TODO: YOUR CODE HERE
/**
* KF Measurement update step
*/
VectorXd y = z - H * x; // 新测量值z时的误差计算
MatrixXd Ht = H.transpose(); //h矩阵转置
MatrixXd S = H * P * Ht + R; //s矩阵
MatrixXd Si = S.inverse(); //s矩阵的求逆矩阵
MatrixXd K = P * Ht * Si; //卡尔曼增益
// new state
x = x + (K * y); //预测后的状态
P = (I - K * H) * P; //预测后的协方差
/**
* KF Prediction step
*/
x = F * x + u;
MatrixXd Ft = F.transpose();
P = F * P * Ft + Q;
cout << "x=" << endl << x << endl;
cout << "P=" << endl << P << endl;
}
}
输出:
x=
0.999001
0
P=
1001 1000
1000 1000
x=
2.998
0.999002
P=
4.99002 2.99302
2.99302 1.99501
x=
3.99967
1
P=
2.33189 0.999168
0.999168 0.499501
参考代码(python)here
def kalman_filter(x, P):
print(x)
for n in range(len(measurements)):
# measurement update
Z = matrix([[measurements[n]]])
y = Z - (H * x)
S = H * P * H.transpose() + R
K = P * H.transpose() * S.inverse()
P = (I - (K*H)) * P
x = x + (K * y)
# prediction
P = F * P * F.transpose()
x = (F*x) + u
return x,P
9. State Prediction
上面用C++实现了一个卡尔曼滤波器来预测更新一维数据,现在驾驶传感器提供的是二维测量数据。

还有一点与之前不同,就是时间差不是固定的了:

x'=Fx+noise 中noise是指在预测位置时产生得不确定性,模型假设在一定间隔内是匀速的,但是实际上物体可能加速减速,那这个模型就通过noise来表示这种不确定性。
测量误差也是存在的,表示传感器测量带来的不确定性。
Quiz1:比较时间间隔0.1秒,和时间间隔5秒,哪个产生的不确定性高,显然是5秒产生的不确定性更大,可以简单的将5秒分成50个0.1秒,而且这连续的50个0.1s中没有反馈可以纠正数据,那么5秒的不确定性,也就是噪声显然是大于0.1秒。 Quiz2:一个行人在一段时间内,有加速有减速,有停止,那这个会给预测模型带来很大的噪声。
From the examples I’ve just showed you we can clearly see that the process noise depends on both:
- the elapsed time
- the uncertainty of acceleration.
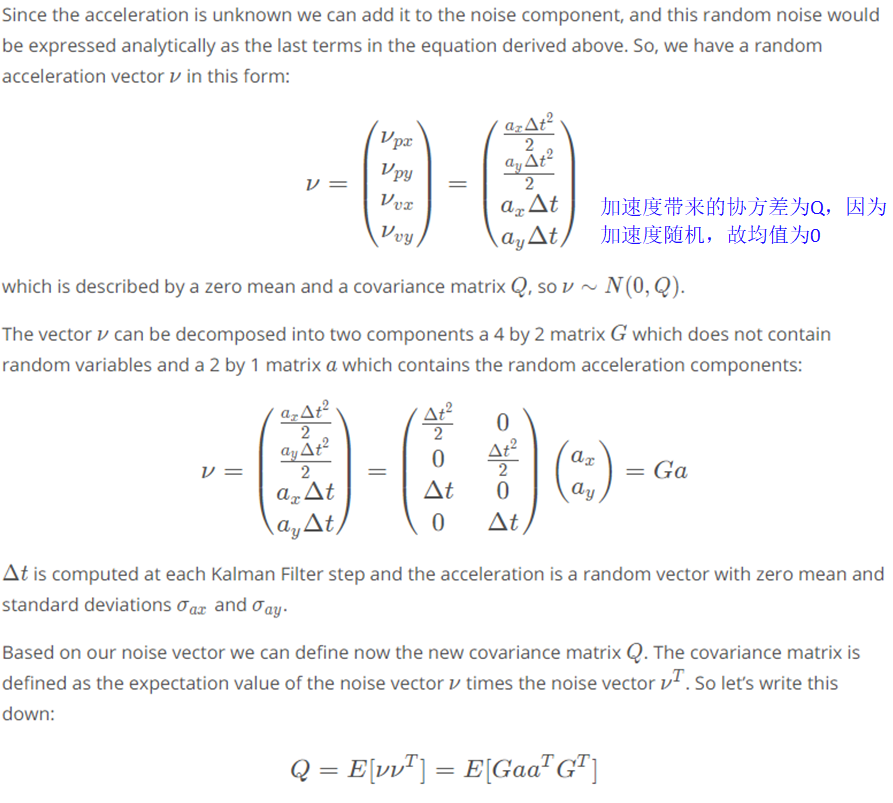
10. Process Covariance Matrix(协方差)
最终状态更新的时候,我们需要将处理(预测时)协方差矩阵转换成状态协方差矩阵。
下面是处理协方差矩阵的计算过程:


更加详细推导过程参考下图:


11. Laser Measurements Part 1
这里需要将预测得到的状态向量,转换为测量得到的位置向量,状态向量中有4维度分别是x和y方向上的位置,以及速度,位置向量就是x和y方向的位置。

H是一个观测向量,用于将二维的x状态向量,转换成与z一样的标量(1*p + 0*v得到位置p,z也是位置信息)。
13. Laser Measurements Part 3

R表示测量的协方差矩阵,用于衡量接收到 激光传感器位置值的不确定性。
下面的编程练习中,实现一个卡尔曼滤波器,该滤波器可以代入激光雷达测量值,并在二维平面上追踪行人,如下图中,行人的状态由右边的state vector表示:

代码主要分为三个类:kalman_filter,tracking,measurement_package。在这个练习中,需要根据当前和之前的测量值之间的时间差,修改F和Q的矩阵。

最后添加的代码在tracking类中的ProcessMeasurement函数中。
13.1 main.cpp
#include <iostream>
#include <sstream>
#include <vector>
#include "Dense"
#include "measurement_package.h"
#include "tracking.h"
using Eigen::MatrixXd;
using Eigen::VectorXd;
using std::cout;
using std::endl;
using std::ifstream;
using std::istringstream;
using std::string;
using std::vector;
int main() {
/**
* Set Measurements
*/
vector<MeasurementPackage> measurement_pack_list;
// hardcoded input file with laser and radar measurements
string in_file_name_ = "obj_pose-laser-radar-synthetic-input.txt";
ifstream in_file(in_file_name_.c_str(), ifstream::in);
if (!in_file.is_open()) {
cout << "Cannot open input file: " << in_file_name_ << endl;
}
string line;
// set i to get only first 3 measurments
int i = 0;
while (getline(in_file, line) && (i<=3)) {
MeasurementPackage meas_package;
istringstream iss(line);
string sensor_type;
iss >> sensor_type; // reads first element from the current line
int64_t timestamp;
if (sensor_type.compare("L") == 0) { // laser measurement
// read measurements
meas_package.sensor_type_ = MeasurementPackage::LASER;
meas_package.raw_measurements_ = VectorXd(2);
float x;
float y;
iss >> x;
iss >> y;
meas_package.raw_measurements_ << x,y;
iss >> timestamp;
meas_package.timestamp_ = timestamp;
measurement_pack_list.push_back(meas_package);
} else if (sensor_type.compare("R") == 0) {
// Skip Radar measurements
continue;
}
++i;
}
// Create a Tracking instance
Tracking tracking;
// call the ProcessingMeasurement() function for each measurement
size_t N = measurement_pack_list.size();
// start filtering from the second frame
// (the speed is unknown in the first frame)
for (size_t k = 0; k < N; ++k) {
tracking.ProcessMeasurement(measurement_pack_list[k]);
}
if (in_file.is_open()) {
in_file.close();
}
return 0;
}
13.2 kalman_filter.cpp
#include "kalman_filter.h"
KalmanFilter::KalmanFilter() {
}
KalmanFilter::~KalmanFilter() {
}
void KalmanFilter::Predict() {
x_ = F_ * x_;
MatrixXd Ft = F_.transpose();
P_ = F_ * P_ * Ft + Q_;
}
void KalmanFilter::Update(const VectorXd &z) {
VectorXd z_pred = H_ * x_;
VectorXd y = z - z_pred;
MatrixXd Ht = H_.transpose();
MatrixXd S = H_ * P_ * Ht + R_;
MatrixXd Si = S.inverse();
MatrixXd PHt = P_ * Ht;
MatrixXd K = PHt * Si;
//new estimate
x_ = x_ + (K * y);
long x_size = x_.size();
MatrixXd I = MatrixXd::Identity(x_size, x_size);
P_ = (I - K * H_) * P_;
}
13.3 kalman_filter.h
#ifndef KALMAN_FILTER_H_
#define KALMAN_FILTER_H_
#include "Dense"
using Eigen::MatrixXd;
using Eigen::VectorXd;
class KalmanFilter {
public:
/**
* Constructor
*/
KalmanFilter();
/**
* Destructor
*/
virtual ~KalmanFilter();
/**
* Predict Predicts the state and the state covariance
* using the process model
*/
void Predict();
/**
* Updates the state and
* @param z The measurement at k+1
*/
void Update(const VectorXd &z);
// state vector
VectorXd x_;
// state covariance matrix
MatrixXd P_;
// state transistion matrix
MatrixXd F_;
// process covariance matrix
MatrixXd Q_;
// measurement matrix
MatrixXd H_;
// measurement covariance matrix
MatrixXd R_;
};
#endif // KALMAN_FILTER_H_
13.4 tracking.cpp - 修改后的代码
#include "tracking.h"
#include <iostream>
#include "Dense"
#include <cmath>
using Eigen::MatrixXd;
using Eigen::VectorXd;
using std::cout;
using std::endl;
using std::vector;
Tracking::Tracking() {
is_initialized_ = false;
previous_timestamp_ = 0;
// create a 4D state vector, we don't know yet the values of the x state
kf_.x_ = VectorXd(4);
// state covariance matrix P
kf_.P_ = MatrixXd(4, 4);
kf_.P_ << 1, 0, 0, 0,
0, 1, 0, 0,
0, 0, 1000, 0,
0, 0, 0, 1000;
// measurement covariance
kf_.R_ = MatrixXd(2, 2);
kf_.R_ << 0.0225, 0,
0, 0.0225;
// measurement matrix
kf_.H_ = MatrixXd(2, 4);
kf_.H_ << 1, 0, 0, 0,
0, 1, 0, 0;
// the initial transition matrix F_
kf_.F_ = MatrixXd(4, 4);
kf_.F_ << 1, 0, 1, 0,
0, 1, 0, 1,
0, 0, 1, 0,
0, 0, 0, 1;
// set the acceleration noise components
noise_ax = 5;
noise_ay = 5;
}
Tracking::~Tracking() {
}
// Process a single measurement
void Tracking::ProcessMeasurement(const MeasurementPackage &measurement_pack) {
if (!is_initialized_) {
//cout << "Kalman Filter Initialization " << endl;
// set the state with the initial location and zero velocity
kf_.x_ << measurement_pack.raw_measurements_[0],
measurement_pack.raw_measurements_[1],
0,
0;
previous_timestamp_ = measurement_pack.timestamp_;
is_initialized_ = true;
return;
}
// compute the time elapsed between the current and previous measurements
// dt - expressed in seconds
float dt = (measurement_pack.timestamp_ - previous_timestamp_) / 1000000.0;
previous_timestamp_ = measurement_pack.timestamp_;
// TODO: YOUR CODE HERE
// 1. Modify the F matrix so that the time is integrated
// 2. Set the process covariance matrix Q
// 3. Call the Kalman Filter predict() function
// 4. Call the Kalman Filter update() function
// with the most recent raw measurements_
// TODO: YOUR CODE HERE
float dt_2 = dt * dt;
float dt_3 = dt_2 * dt;
float dt_4 = dt_3 * dt;
// Modify the F matrix so that the time is integrated
kf_.F_(0, 2) = dt;
kf_.F_(1, 3) = dt;
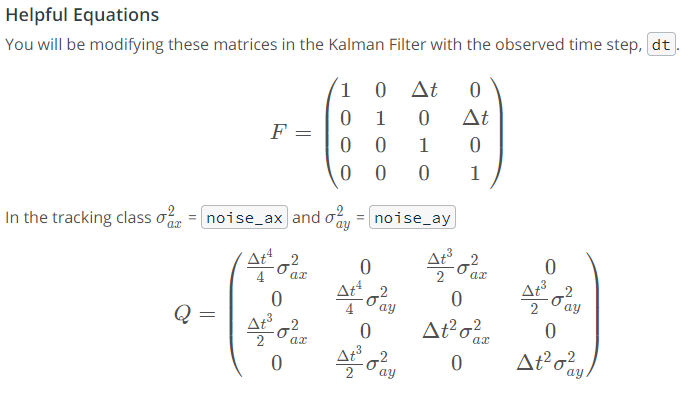
// set the process covariance matrix Q
kf_.Q_ = MatrixXd(4, 4);
kf_.Q_ << dt_4/4*noise_ax, 0, dt_3/2*noise_ax, 0,
0, dt_4/4*noise_ay, 0, dt_3/2*noise_ay,
dt_3/2*noise_ax, 0, dt_2*noise_ax, 0,
0, dt_3/2*noise_ay, 0, dt_2*noise_ay;
// predict
kf_.Predict();
// measurement update
kf_.Update(measurement_pack.raw_measurements_);
cout << "x_= " << kf_.x_ << endl;
cout << "P_= " << kf_.P_ << endl;
}
13.5 tracking.h
#ifndef TRACKING_H_
#define TRACKING_H_
#include <vector>
#include <string>
#include <fstream>
#include "kalman_filter.h"
#include "measurement_package.h"
class Tracking {
public:
Tracking();
virtual ~Tracking();
void ProcessMeasurement(const MeasurementPackage &measurement_pack);
KalmanFilter kf_;
private:
bool is_initialized_;
int64_t previous_timestamp_;
//acceleration noise components
float noise_ax;
float noise_ay;
};
#endif // TRACKING_H_
13.6 measurement_package.h
#ifndef MEASUREMENT_PACKAGE_H_
#define MEASUREMENT_PACKAGE_H_
#include "Dense"
class MeasurementPackage {
public:
enum SensorType {
LASER, RADAR
} sensor_type_;
Eigen::VectorXd raw_measurements_;
int64_t timestamp_;
};
#endif // MEASUREMENT_PACKAGE_H_
最后输出:
x_= 0.96749
0.405862
4.58427
-1.83232
P_= 0.0224541 0 0.204131 0
0 0.0224541 0 0.204131
0.204131 0 92.7797 0
0 0.204131 0 92.7797
x_= 0.958365
0.627631
0.110368
2.04304
P_= 0.0220006 0 0.210519 0
0 0.0220006 0 0.210519
0.210519 0 4.08801 0
0 0.210519 0 4.08801
x_= 1.34291
0.364408
2.32002
-0.722813
P_= 0.0185328 0 0.109639 0
0 0.0185328 0 0.109639
0.109639 0 1.10798 0
0 0.109639 0 1.10798
14. Laser Measurements Part 4
使用公式:
更新的代码如下:
// Process a single measurement
void Tracking::ProcessMeasurement(const MeasurementPackage &measurement_pack) {
if (!is_initialized_) {
//cout << "Kalman Filter Initialization " << endl;
// set the state with the initial location and zero velocity
kf_.x_ << measurement_pack.raw_measurements_[0],
measurement_pack.raw_measurements_[1],
0,
0;
previous_timestamp_ = measurement_pack.timestamp_;
is_initialized_ = true;
return;
}
// compute the time elapsed between the current and previous measurements
// dt - expressed in seconds
float dt = (measurement_pack.timestamp_ - previous_timestamp_) / 1000000.0;
previous_timestamp_ = measurement_pack.timestamp_;
// TODO: YOUR CODE HERE
float dt_2 = dt * dt;
float dt_3 = dt_2 * dt;
float dt_4 = dt_3 * dt;
// Modify the F matrix so that the time is integrated
kf_.F_(0, 2) = dt;
kf_.F_(1, 3) = dt;
// set the process covariance matrix Q
kf_.Q_ = MatrixXd(4, 4);
kf_.Q_ << dt_4/4*noise_ax, 0, dt_3/2*noise_ax, 0,
0, dt_4/4*noise_ay, 0, dt_3/2*noise_ay,
dt_3/2*noise_ax, 0, dt_2*noise_ax, 0,
0, dt_3/2*noise_ay, 0, dt_2*noise_ay;
// predict
kf_.Predict();
// measurement update
kf_.Update(measurement_pack.raw_measurements_);
cout << "x_= " << kf_.x_ << endl;
cout << "P_= " << kf_.P_ << endl;
}
15. Radar Measurements

上面的14节的例子中,只有一个激光雷达,激光雷达只能探测到位置信息,雷达虽然精度不高,但是能获取速度信息,将这两者融合能得到更高的精度。
下面是雷达获取的测量值,与激光雷达不同,包含了:
- 径向距离
- 方向角
- 径向速度

利用卡尔曼滤波器公式:

h(x’)将预测向量,转换成测量向量的形式:
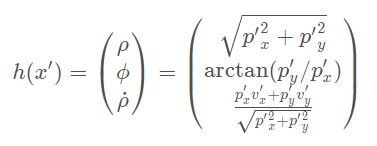
这个函数是个非线性函数,将预测值的位置和速度(笛卡尔坐标),转换成极坐标系(径向半径,径向速度,方向角)的形式。
详细的推导过程如下:



16. Mapping with a Nonlinear Function
What happens if we have a nonlinear measurement function, h(x). Can we apply the Kalman Filter equations to update the predicted state, X, with new measurements, z?
问题:能使用卡尔曼滤波器,来更新测量值z和预测值X吗?
Answer:No, We aren’t working with Gaussian distributions after applying a nonlinear measurement function. 还需要对非线性处理结果进行高斯分布处理。
17. Extended Kalman Filter
如上所述,应用h(x’)函数后,就不是高斯分布了,那么卡尔曼滤波器也不再适用了。
如下图,高斯分布的值,在经过h(x’)函数后:

所以需要对h(x)函数进行线性化操作,这个是扩展卡尔曼滤波器的核心思想。
扩展卡尔曼滤波器使用了一阶泰勒展开法,将非线性函数进行线性化处理。
关于泰勒展开式,参考here
18. Multivariate Taylor Series Expansion

上面的函数,在mu=0处的一阶泰勒展开式 h(x)≈x。

19. Jacobian Matrix Part 1

Hj矩阵形式为:
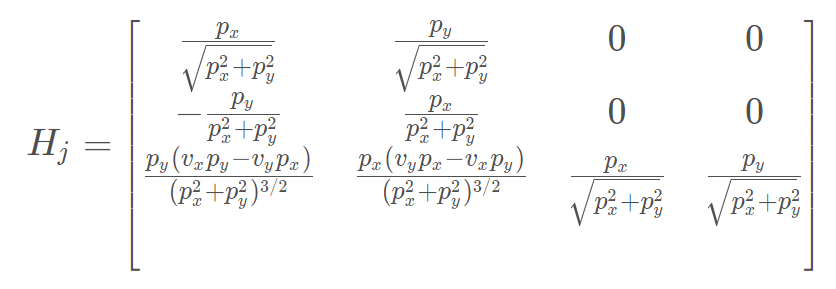
用代码实现为:
#include <iostream>
#include <vector>
#include "Dense"
using Eigen::MatrixXd;
using Eigen::VectorXd;
using std::cout;
using std::endl;
MatrixXd CalculateJacobian(const VectorXd& x_state);
int main() {
/**
* Compute the Jacobian Matrix
*/
// predicted state example
// px = 1, py = 2, vx = 0.2, vy = 0.4
VectorXd x_predicted(4);
x_predicted << 1, 2, 0.2, 0.4;
MatrixXd Hj = CalculateJacobian(x_predicted);
cout << "Hj:" << endl << Hj << endl;
return 0;
}
MatrixXd CalculateJacobian(const VectorXd& x_state) {
MatrixXd Hj(3,4);
// recover state parameters
float px = x_state(0);
float py = x_state(1);
float vx = x_state(2);
float vy = x_state(3);
// pre-compute a set of terms to avoid repeated calculation
float c1 = px*px+py*py;
float c2 = sqrt(c1);
float c3 = (c1*c2);
// check division by zero
if (fabs(c1) < 0.0001) {
cout << "CalculateJacobian () - Error - Division by Zero" << endl;
return Hj;
}
// compute the Jacobian matrix
Hj << (px/c2), (py/c2), 0, 0,
-(py/c1), (px/c1), 0, 0,
py*(vx*py - vy*px)/c3, px*(px*vy - py*vx)/c3, px/c2, py/c2;
return Hj;
}
21. EKF Algorithm Generalization
对比卡尔曼滤波与扩展卡尔曼滤波的区别:

- 计算预测协方差的时候,使用Fj代替F矩阵
- 计算S/K/P时,使用Hj矩阵代替H矩阵
- 计算x’时,使用预测更新函数f,代替F矩阵
- 计算y时,使用h函数代替H矩阵

Quiz:
Compared to Kalman Filters, how would the Extended Kalman Filter result differ when the prediction function and measurement function are both linear? -> The Extended Kalman Filter’s result would be the same as the standard kalman Filter’s result.
If f and h are linear functions, then the Extended Kalman Filter generates exactly the same result as the standard Kalman Filter. Actually, if f and h are linear then the Extended Kalman Filter F_j turns into f and H_j turns into h. All that’s left is the same ol’ standard Kalman Filter!
In our case we have a linear motion model, but a nonlinear measurement model when we use radar observations. So, we have to compute the Jacobian only for the measurement function.
22. Sensor Fusion General Flow
有一名正在移动的行人,他的状态通过二维位置和二维速度表示,每次收到传感器过来的值,都会触发估算函数:Process Measurement。
- 第一次迭代,只是初始化状态和协方差矩阵。
- 然后,我们调用了预测和测量更新。
- 在预测前,先计算前后两次的时间差。
- 然后用时间差,计算新的状态转换和过程协方差矩阵。
- 测量更新,取决于传感器类型,如果当前是雷达类型,就必须要计算新的额雅克比矩阵Hj,使用非线性函数来预估预测状态,并调用测量更新。
- 如果当前是激光传感器,我们只需要使用激光的H和R矩阵设置扩展卡尔曼滤波器,然后调用测量更新。
23. Evaluating KF Performance Part 1
用上述公式评价估算结果与真实结果的差别,C++代码实现如下:
#include <iostream>
#include <vector>
#include "Dense"
using Eigen::MatrixXd;
using Eigen::VectorXd;
using std::cout;
using std::endl;
using std::vector;
VectorXd CalculateRMSE(const vector<VectorXd> &estimations,
const vector<VectorXd> &ground_truth);
int main() {
/**
* Compute RMSE
*/
vector<VectorXd> estimations;
vector<VectorXd> ground_truth;
// the input list of estimations
VectorXd e(4);
e << 1, 1, 0.2, 0.1;
estimations.push_back(e);
e << 2, 2, 0.3, 0.2;
estimations.push_back(e);
e << 3, 3, 0.4, 0.3;
estimations.push_back(e);
// the corresponding list of ground truth values
VectorXd g(4);
g << 1.1, 1.1, 0.3, 0.2;
ground_truth.push_back(g);
g << 2.1, 2.1, 0.4, 0.3;
ground_truth.push_back(g);
g << 3.1, 3.1, 0.5, 0.4;
ground_truth.push_back(g);
// call the CalculateRMSE and print out the result
cout << CalculateRMSE(estimations, ground_truth) << endl;
return 0;
}
VectorXd CalculateRMSE(const vector<VectorXd> &estimations,
const vector<VectorXd> &ground_truth) {
VectorXd rmse(4);
rmse << 0,0,0,0;
// check the validity of the following inputs:
// * the estimation vector size should not be zero
// * the estimation vector size should equal ground truth vector size
if (estimations.size() != ground_truth.size()
|| estimations.size() == 0) {
cout << "Invalid estimation or ground_truth data" << endl;
return rmse;
}
// accumulate squared residuals
for (unsigned int i=0; i < estimations.size(); ++i) {
VectorXd residual = estimations[i] - ground_truth[i];
// coefficient-wise multiplication
residual = residual.array()*residual.array();
rmse += residual;
}
// calculate the mean
rmse = rmse/estimations.size();
// calculate the squared root
rmse = rmse.array().sqrt();
// return the result
return rmse;
}
输出:
0.1
0.1
0.1
0.1
25. Outro
通过上面的代码,从大的层面上,已经设计了融合系统,该系统能够融合激光和雷达传感器提供的测量值,这样我们就能估算行人的位置和速度。
后面还学习了如果实现卡尔曼滤波器,以及非线性测量模型的操作,后面还要深入学习如何处理非线性运动,如汽车的转弯等,你需要创建无损卡尔曼滤波器